
¿Te imaginas un auto RC que recorre tu calle, frena, dobla y completa vueltas enteras sin que nadie toque el control? No es magia ni un volante escondido: es posicionamiento satelital de precisión centimétrica. En las carreras de autos RC autónomos al aire libre, el truco está en combinar un receptor GNSS RTK con una radio de telemetría que envía correcciones en tiempo real desde una estación base fija. Tom Coyle, de DIY Robocars, armó exactamente ese sistema sobre un chasis Traxxas Slash y documentó cómo se comporta en pista. En esta guía vas a entender pieza por pieza cómo funciona ese stack, qué hace cada componente y cómo replicar la idea con hardware disponible en Chile.
Al terminar de leer vas a saber qué es un Rover RTK, por qué necesita una estación base, cómo se configuran los puertos serie del receptor, qué rol juega la radio LoRa de largo alcance y cómo el software DonkeyCar graba y reproduce una ruta usando solo coordenadas GPS.
Qué es un sistema RTK y por qué importa
Un GPS común te ubica con un error de varios metros, suficiente para una app de mapas pero inútil para que un auto siga una línea de carrera. RTK (Real Time Kinematics) reduce ese error a centímetros. La clave es que no trabaja solo: una estación base, instalada en un punto fijo y conocido, calcula cuánto se desvía la señal satelital en ese instante y transmite esa corrección al receptor móvil, llamado Rover. El Rover aplica la corrección y obtiene una posición "fija" muy precisa.
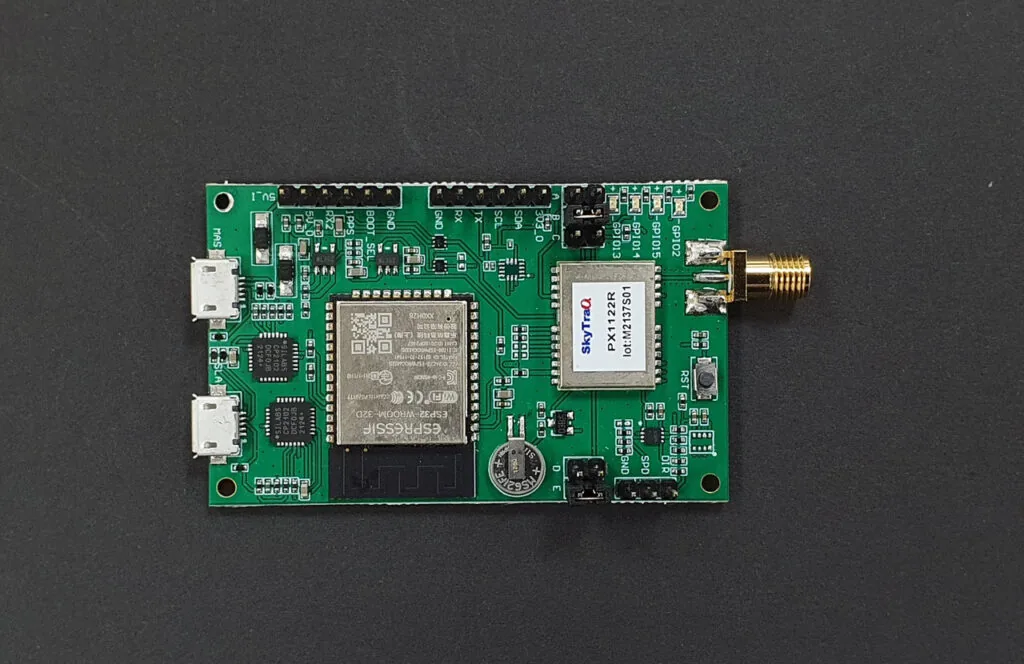
El corazón del montaje es un receptor GNSS RTK quad banda Quectel LG290P, que viene montado sobre un breakout SparkFun Quadband GNSS RTK. Quad banda significa que recibe simultáneamente las bandas L1, L2, L5 y L6/E6 de varias constelaciones satelitales a la vez. Mientras más bandas y más satélites, más rápido y más estable el "fix" RTK. El módulo además trae una unidad NIC anti jamming, que detecta y filtra interferencias de banda angosta: clave para no perder precisión cerca de árboles densos o en zonas urbanas con mucho ruido electromagnético.
La antena que acompaña al receptor es una u-blox multibanda de alta precisión. No es una antena GPS cualquiera: está diseñada para captar L1, L2, L5 y E6 con bajo ruido, que es justo lo que el receptor quad banda necesita para rendir al máximo.

El enlace de telemetría LoRa
La estación base y el Rover tienen que hablarse a distancia, y ahí entra la radio Micoair LR900-F, que viene en un set de dos unidades. Es una radio de telemetría de largo alcance que transmite en 915 MHz (rango 890 a 915 MHz), con potencia de salida ajustable hasta 500 mW. Usa modulación LoRa más salto de frecuencia (frequency hopping), lo que le da una resistencia a interferencias excelente. Y como trabaja en modo de transmisión transparente, es compatible con cualquier dato o protocolo: por el aire viajan los mensajes de corrección RTCM3 desde la base hasta el Rover sin que la radio se meta en el contenido.
En la práctica, Tom logró manejar el Rover a más de un cuarto de milla con línea de vista desde la base, y con la radio de la estación base en su potencia mínima nunca perdió la señal. Es decir: con la potencia al mínimo ya sobra alcance, así que en distancias mayores o entornos urbanos complejos hay mucho margen subiendo a potencia media o máxima.
Configuración del hardware
Antes de montar todo sobre el chasis, hay que dejar configurados el receptor y la radio. El receptor LG290P se ajusta con la app Quectel QGNSS así:
- UART1 a 115200 baudios.
- UART3 a 57600 baudios.
- Salida USB de UART1 limitada a solo cuatro mensajes NMEA pertinentes (en vez de inundar el bus con todos).
La radio Micoair LR900-F se ajusta con la app Micoair Micoassistant, y en el lado del Rover se configura el Broadcast Mode en modo solo recepción (Rx). La estación base, en cambio, va en modo transmisión (Tx) para enviar las correcciones RTCM3.
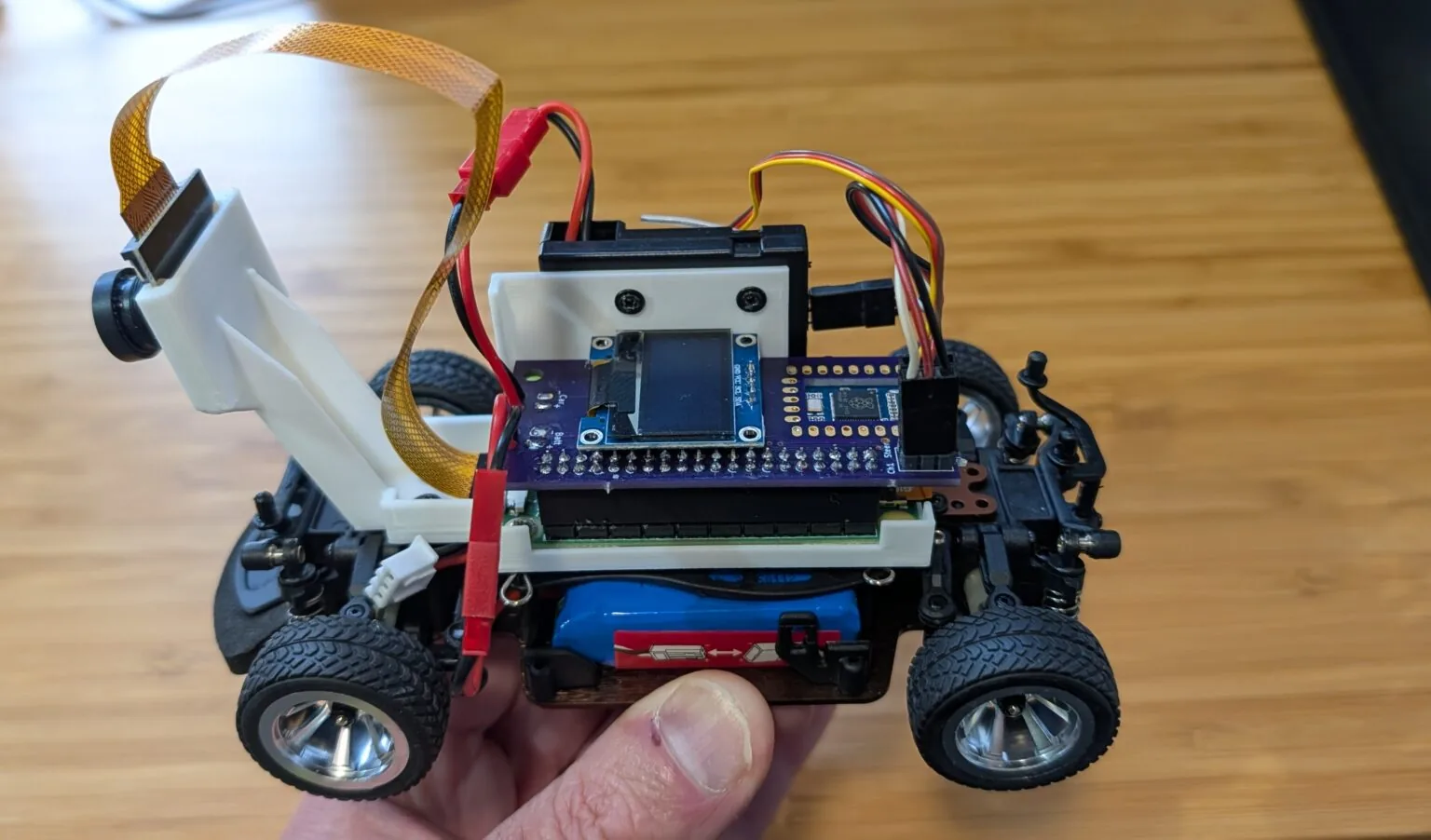
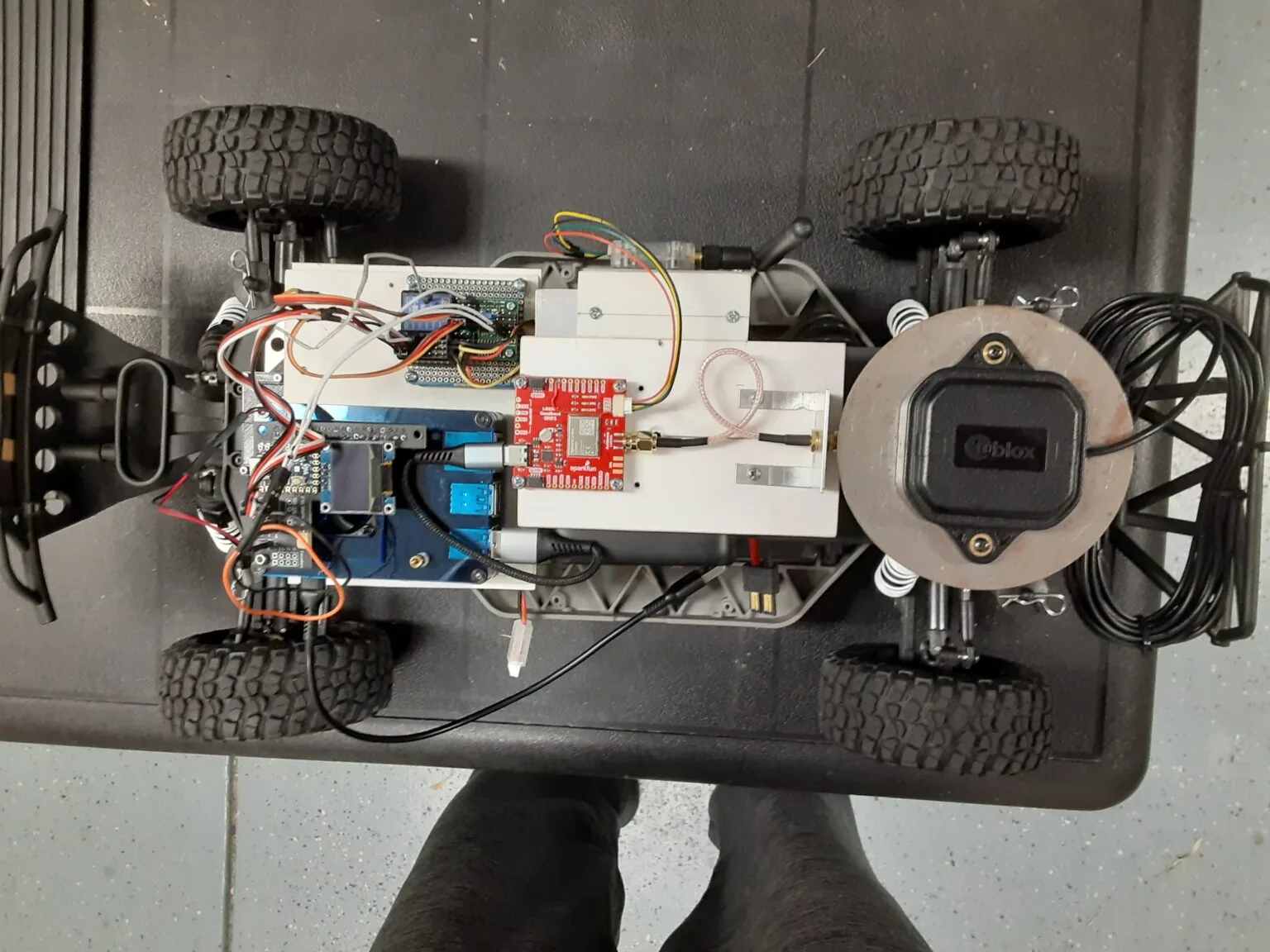
El cableado físico es directo: la radio LR900-F se conecta con un cable de cuatro hilos al puerto UART3 del breakout, y la antena u-blox al conector SMA del mismo breakout. La Raspberry Pi 4B se comunica con el breakout GNSS por USB. Todo eso, junto al DonkeyCar RC HAT, el receptor RC FlySky y el power bank Anker, va montado sobre un sub chasis que se atornilla al Traxxas Slash.

Grabar y reproducir la ruta con DonkeyCar
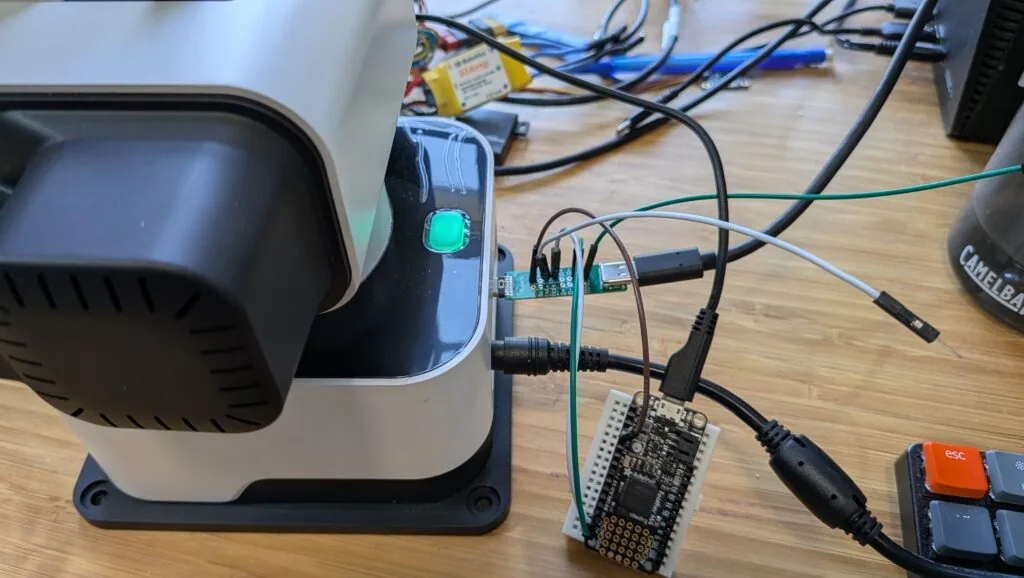
Con el hardware listo, el flujo de trabajo se apoya en DonkeyCar, un framework open source para autos RC autónomos. La estación base se enciende primero, en la entrada de la casa con vista despejada al cielo, transmitiendo correcciones en modo Tx. Después se enciende la Raspberry Pi del Rover y el ESC, y desde un notebook se entra por SSH a la línea de comandos de la Pi.
La secuencia de grabación es la siguiente: se lleva el Rover a la calle, se lo alinea con una línea de tiza como punto de partida y se verifica que el LED RTK del receptor quede en blanco fijo, lo que indica una solución RTK "fija" (la buena). Recién ahí se lanza el programa de seguimiento de ruta con el comando python manage.py drive sobre la CLI, se abre la interfaz web de DonkeyCar en el navegador, se resetea el origen del auto y se aprieta grabar. Con el control RC se maneja el Rover lentamente por el circuito, y el sistema guarda coordenadas de latitud y longitud cada 0,2 metros hasta volver al punto de tiza inicial. Esa ruta queda guardada como un archivo donkey_path.csv para reproducirla después.
La prueba real es la reproducción autónoma. Desde la interfaz web se resetea el origen en la línea de salida, se selecciona "Full Auto" y el Rover arranca solo a velocidad moderada (definida por un valor PID prefijado). En el circuito tipo óvalo Indy que armó Tom, el auto subía la calle en línea recta, hacía un giro en U de 180 grados perfecto, bajaba por el otro lado y completaba otro giro en U al final, encadenando diez vueltas más sin salirse ni chocar contra el bordillo.
Qué tan bien anda: los resultados
Lo interesante es la comparación. Frente a un Rover Traxxas E-Maxx equipado con un receptor RTK ZED-F9P, el Rover Slash con el LG290P negoció los giros en U de 180 grados con muy poco o nada de sobrepaso, y mostró bastante menos "búsqueda" o zigzagueo en las rectas. En criollo: con el receptor quad banda el auto va más derecho y dobla más limpio. Eso sugiere que el salto de un receptor de menos bandas a uno quad banda se nota en la suavidad del manejo autónomo, aunque siempre influyen el ajuste de las constantes P y D del controlador y la calidad del fix.
Variantes y mejoras
Una vez que tenés el sistema base andando, hay varias formas de llevarlo más lejos:
- Telemetría de vuelta al piloto: además de recibir correcciones, podés usar el segundo canal de la radio LoRa para que el Rover devuelva su estado (velocidad, calidad del fix, voltaje de batería) a un tablero en tu notebook. Como la radio es de transmisión transparente, solo necesitás definir el formato de los mensajes.
- Registro de datos a bordo: conectá una tarjeta microSD a la Raspberry Pi y guardá un log de cada vuelta con timestamp, posición y error lateral. Con eso podés graficar dónde el auto se desvía más y afinar el circuito o las constantes PID.
- Estación base portátil: en vez de dejar la base fija en tu casa, podés armar una base portátil tipo SparkFun RTK Postcard con su propia radio LR900-F, así corrés en cualquier cancha o calle sin depender de una ubicación única.
- Sintonía fina del PID: el comportamiento en los giros depende de las constantes P y D. Si el auto sobrepasa la curva, baja la P; si zigzaguea en la recta, ajusta la D. Llevá un registro de cada combinación que pruebes.
Personalización para Chile
El montaje original usa hardware muy específico de carreras (chasis Traxxas, receptor LG290P, radio Micoair), que no siempre se consigue acá. Pero la idea es replicable con componentes equivalentes disponibles en MechatronicStore:
- Receptor GNSS RTK: el catálogo tiene el Módulo GNSS RTK LC29HDAMD doble banda L1/L5 con antena (SKU F-508), por $82.560. No es el quad banda del tutorial, sino un RTK de doble banda, pero igual te entrega corrección centimétrica para un Rover y viene con antena incluida, así que es el punto de partida local más directo para experimentar con RTK.
- Radio de telemetría LoRa: para el enlace de correcciones a 900 MHz, el Módulo LoRa EBYTE E32-900T30D 900MHz (SKU GQ1-3), por $14.990, cumple el mismo rol que la radio del tutorial: transmisión transparente por UART, largo alcance y alta potencia. Necesitás dos, uno en la base y otro en el Rover.
- Computadora de a bordo: el tutorial corre DonkeyCar en una Raspberry Pi 4B. En el catálogo local la opción vigente es la Raspberry Pi 5 (4/8GB RAM), que tiene de sobra para esta tarea. La Pi Zero 2 W también puede servir para versiones más livianas del stack.
El chasis RC, el motor brushless con ESC, el receptor FlySky y la batería LiPo 2S los podés conseguir en tiendas de hobby RC o reutilizar de un auto que ya tengas.
Recursos
- Artículo original (inglés): Evaluating the Quectel LG290P GNSS RTK Receiver and the Micoair LR900-F LoRa, por Tom Coyle en DIY Robocars.
- Framework DonkeyCar: documentación oficial y repositorio en GitHub.
- Radio Micoair LR900-F: ficha del fabricante.
- Hardware de referencia: SparkFun Quadband GNSS RTK Breakout (LG290P) y antena multibanda de alta precisión.
Versión chilena inspirada en el trabajo de Tom Coyle, con componentes equivalentes en stock local en MechatronicStore.